|
|
|
Programming: Updating Old Code to Work with this Robot
date_range 01/07/2022 The LiftStateMachine explained in “Build Day: Motor and Rotation Sensor to Lift, Worked on Lift Code, Built Holder 1.1.1,and Mounted Radio” on 11/10/2021 for the last robot will be functionally identical when adapted for this bot. Additionally, a nearly identical state machine design was used for our ring intake and for the pneumatic holder. Because most of the code is exactly the same, we don’t need to put it here. All specific changes can be seen in the code branch of the GitHub repository this notebook is hosted in.
Build Day: Attaching the Brain
date_range 01/06/2022 Robot-3CreateWe attached the Brain to the robot which will let the motors, sensors etc function.
Build Day: Bracing the lift
date_range 01/03/2022 Lift-2.0.3CreateWe put on the bracing for the lift today. We used box bracing which is much more secure than normal:
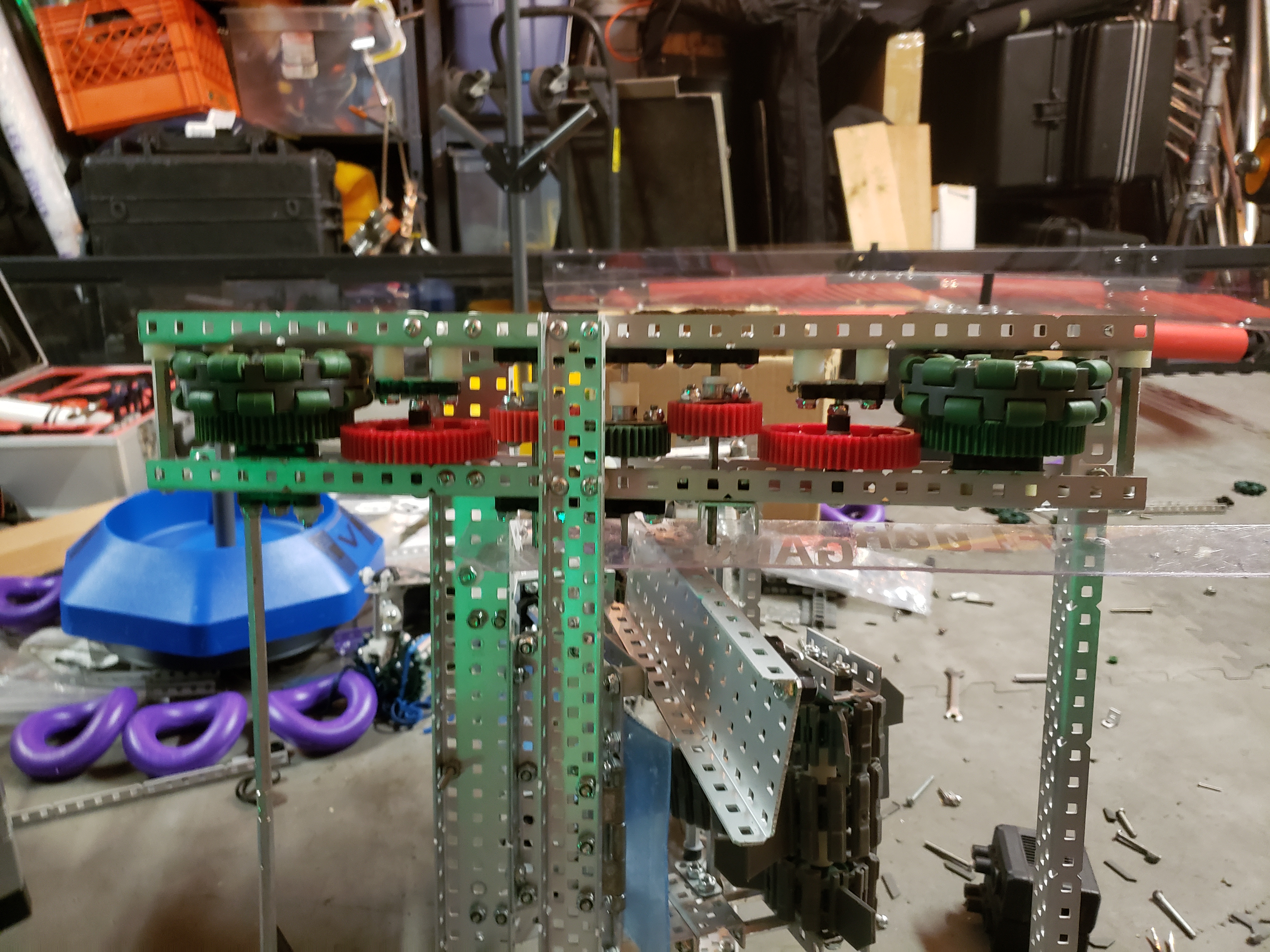
Finishing the Drivetrain
date_range 12/19/2021 We finished the second half to our drivetrain. We tested the friction on the wheels and they were able to spin freely for about 3 seconds. Having low friction on a drivetrain is very important because it reduces the amount of work the motors have to do, and because the robot will have to do lots of heavy lifting the easier we can make it for the motors the better.
Testing Motors for the Drivetrain
date_range 12/17/2021 Testing MotorsIn our experience, we have discovered that not all V5 motors perform at the same level, so for the drivetrain, which needs to be very fast, and very consistent, we will sort through the motors to find the best ones. |
-
 The 7 Dorks
the7dorks333A@gmail.com
The 7 Dorks
the7dorks333A@gmail.com
- homeHome
- sortCategories
- labelTags
- personAbout