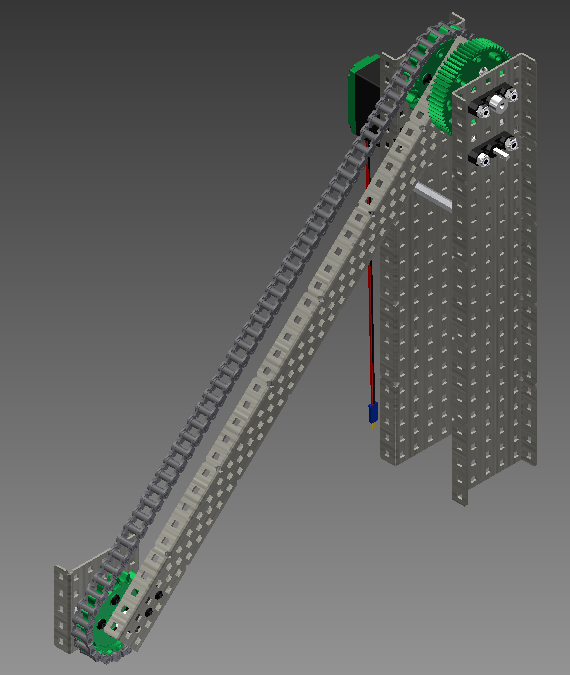
Intake-2.0.0
Based on our decision in “Research: Looking at More Recent Robots | Brainstorming: New Robot?” on 11/22/2021, we need some sort of ring intaking conveyor.
Design
-
Spacing of rollers approximated based on how the Rings look in the cad. There is a good chance this is wrong, but this design makes it VERY easy to change, just by adding/removing spacing on the standoffs.
-
It’s angle and length are supposed to line up well with the top of alliance goals, but both of these variables are also very easy to change:it’s attached at the base with a hinge, so we could tilt it to whatever angle works best, then add bracing to keep it in the right place.
Lift-2.0.0
Based on our decision in “Research: Looking at More Recent Robots | Brainstorming: New Robot?” on 11/22/2021, we need some sort of lift.
Design
Feasible options:
- Double Reverse Four Bar - this type of lift is very stury and fast, but also very big and heavy. It also allows for a very high lifting height, but we don’t really need to lift that high, so we might not need something so bulky. This is the DR4B shown in our tutorial, which we submitted along with our notebook:

- Chain Bar - this type of lift is very compact, but the chain could break at any point, especially when it’s under the load of a Mobile Goal, so hopefully we can do something sturdier:
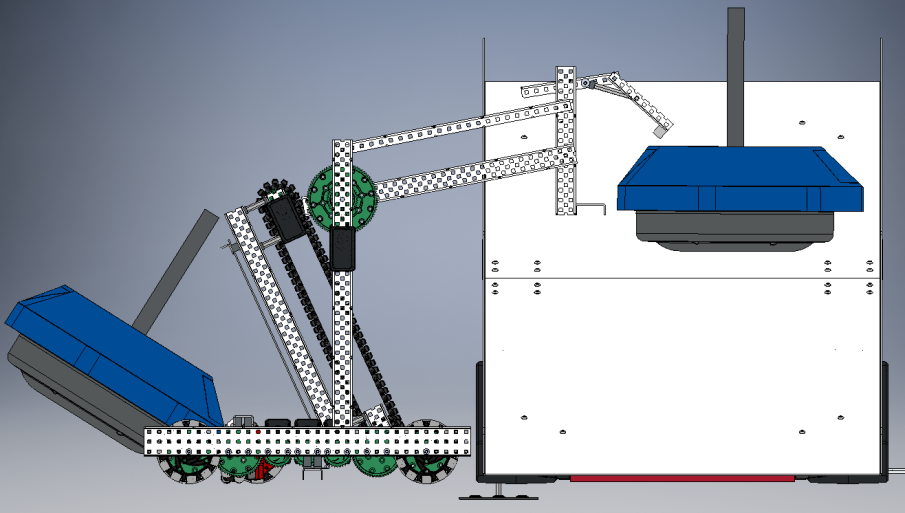
- We decided on a four bar lift because it keeps the mobile goals level with the ground which makes it easier to place/remove goals on the Platform. It is better than a DR4B because it is more compact like a chain lift, but better than a chain lift because it’s more sturdy.
- The lift is positioned as far back on the robot as possible to keep the robot from tipping. Also, the length of the arms are just right to be able to reach goals far back on the platform (to make it easier to descore opposing mobile goals), and also able to reach higher than the high end of the platform when it’s tilted down. This will hopefully make balancing the platform easier.
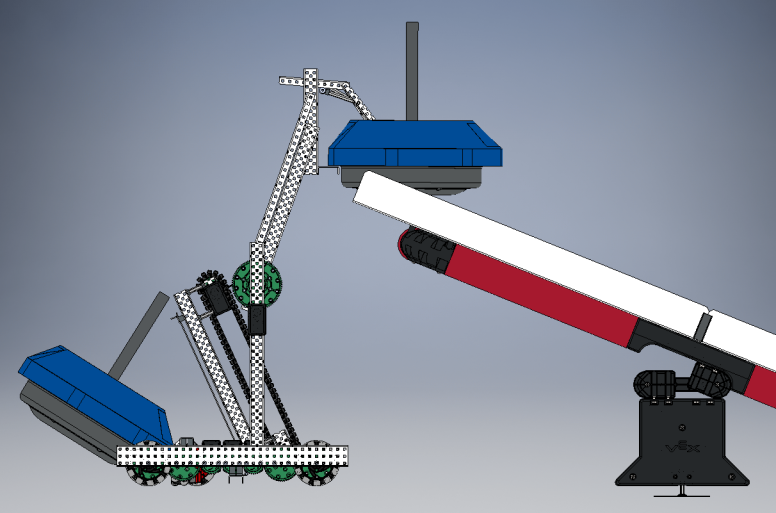
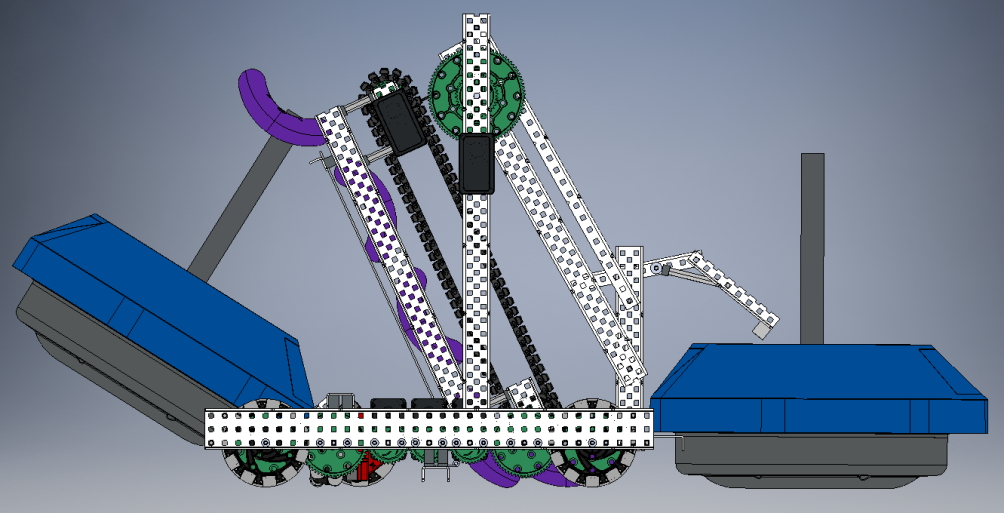
Robot-2.0.0
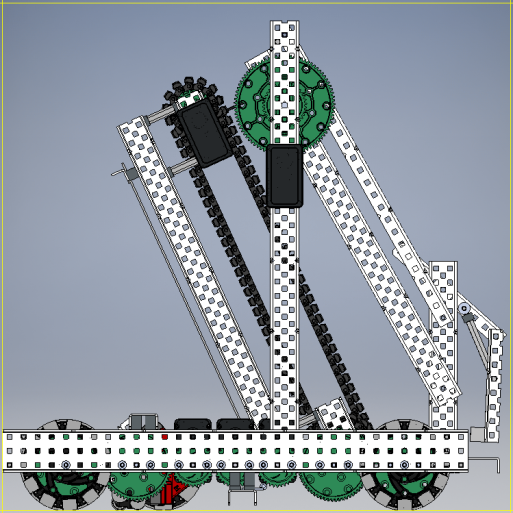
At the end of the day we managed to make our simple ring conveyor, four bar lift, and claw in one final design.
|
 The 7 Dorks
the7dorks333A@gmail.com
The 7 Dorks
the7dorks333A@gmail.com