Brainstorming: Single Pneumatic Mobile Goal Holder Ideas
sort
|
Holder-2.0.0
Design
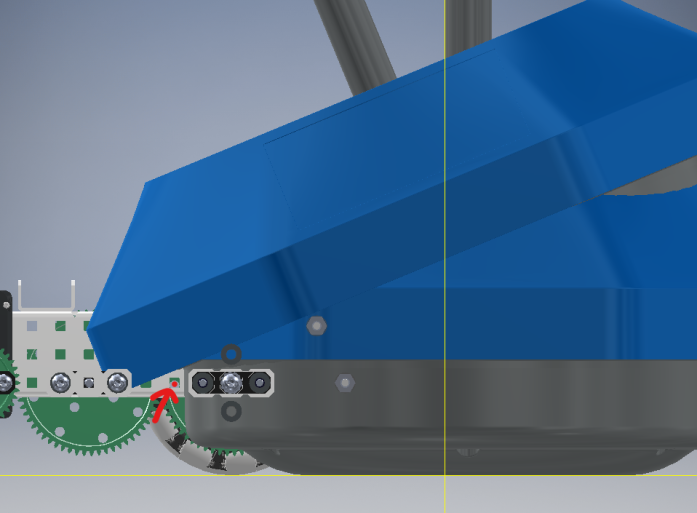
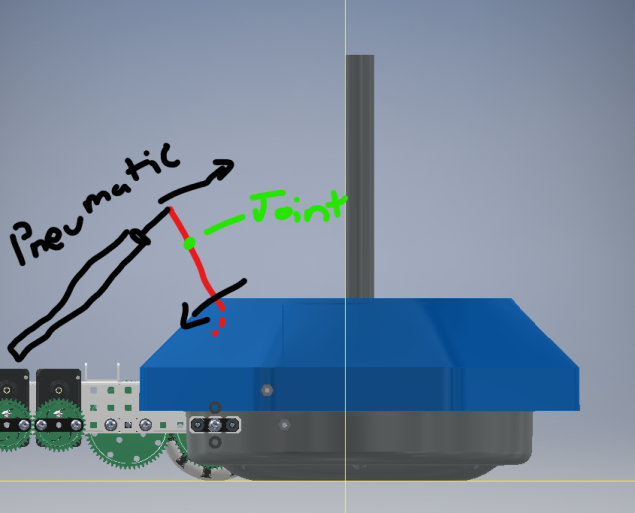
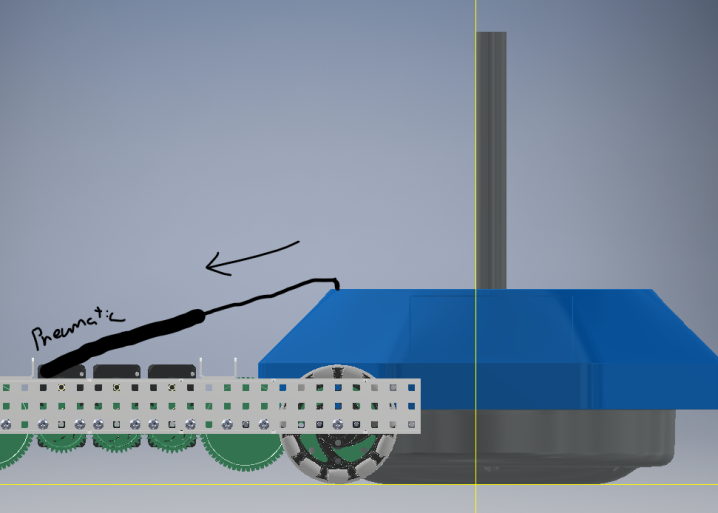
Actually implementing pneumatics to make this happen:
|
-
 The 7 Dorks
the7dorks333A@gmail.com
The 7 Dorks
the7dorks333A@gmail.com
- homeHome
- sortCategories
- labelTags
- personAbout