Build Day: Pneumatic Claw 2.0.1, Tracking Wheels, and Braced Holder
sort
|
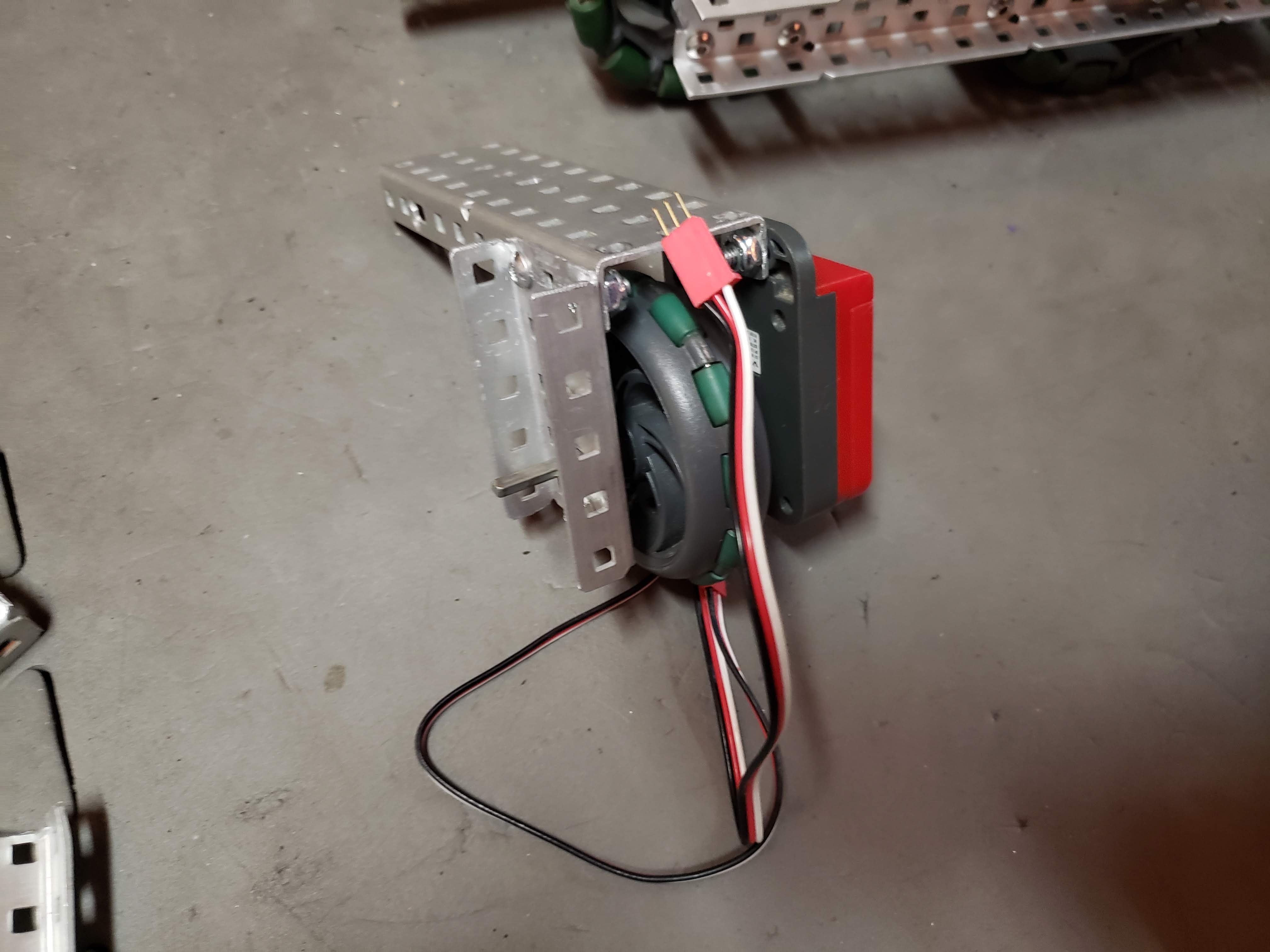
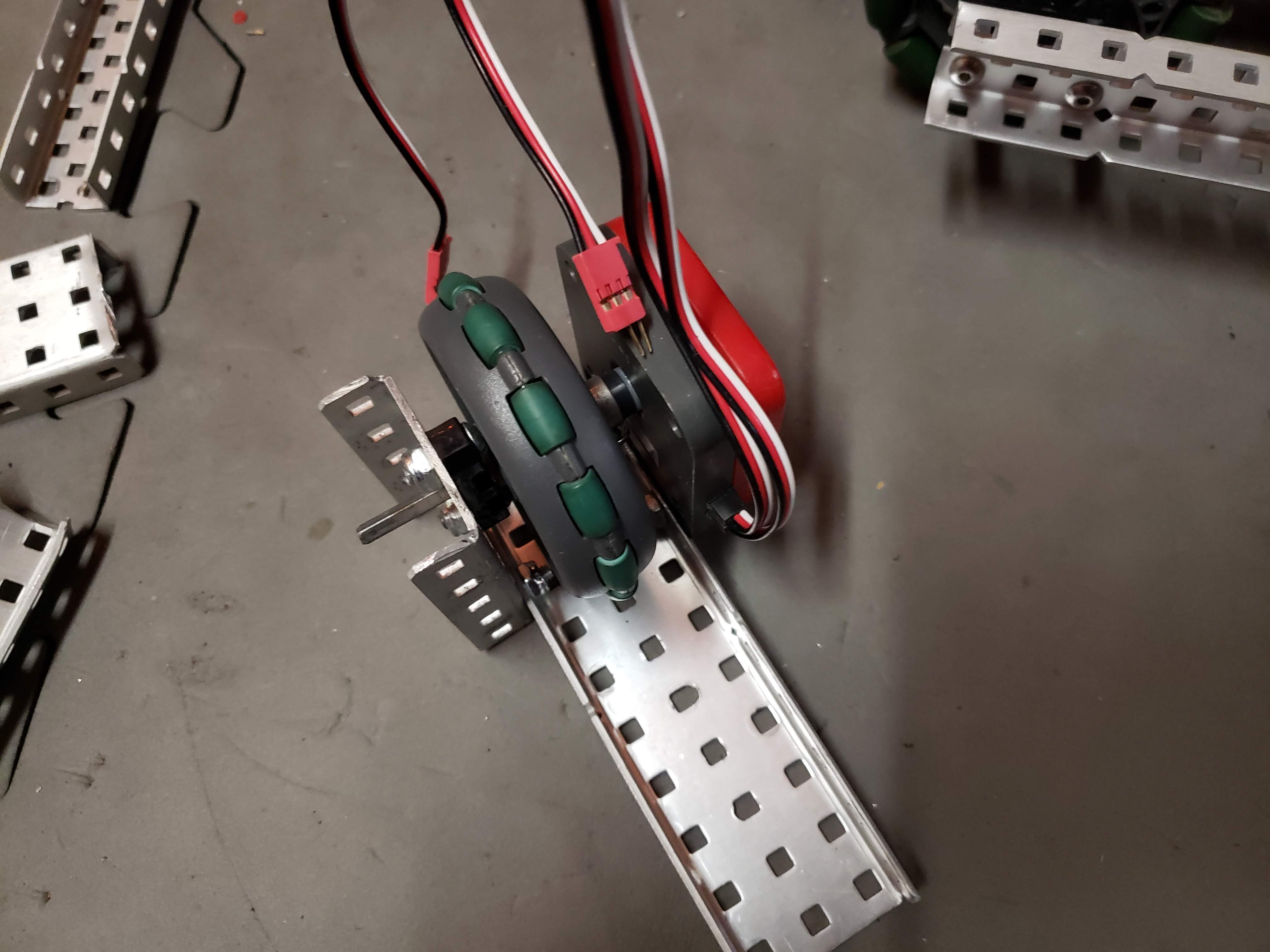
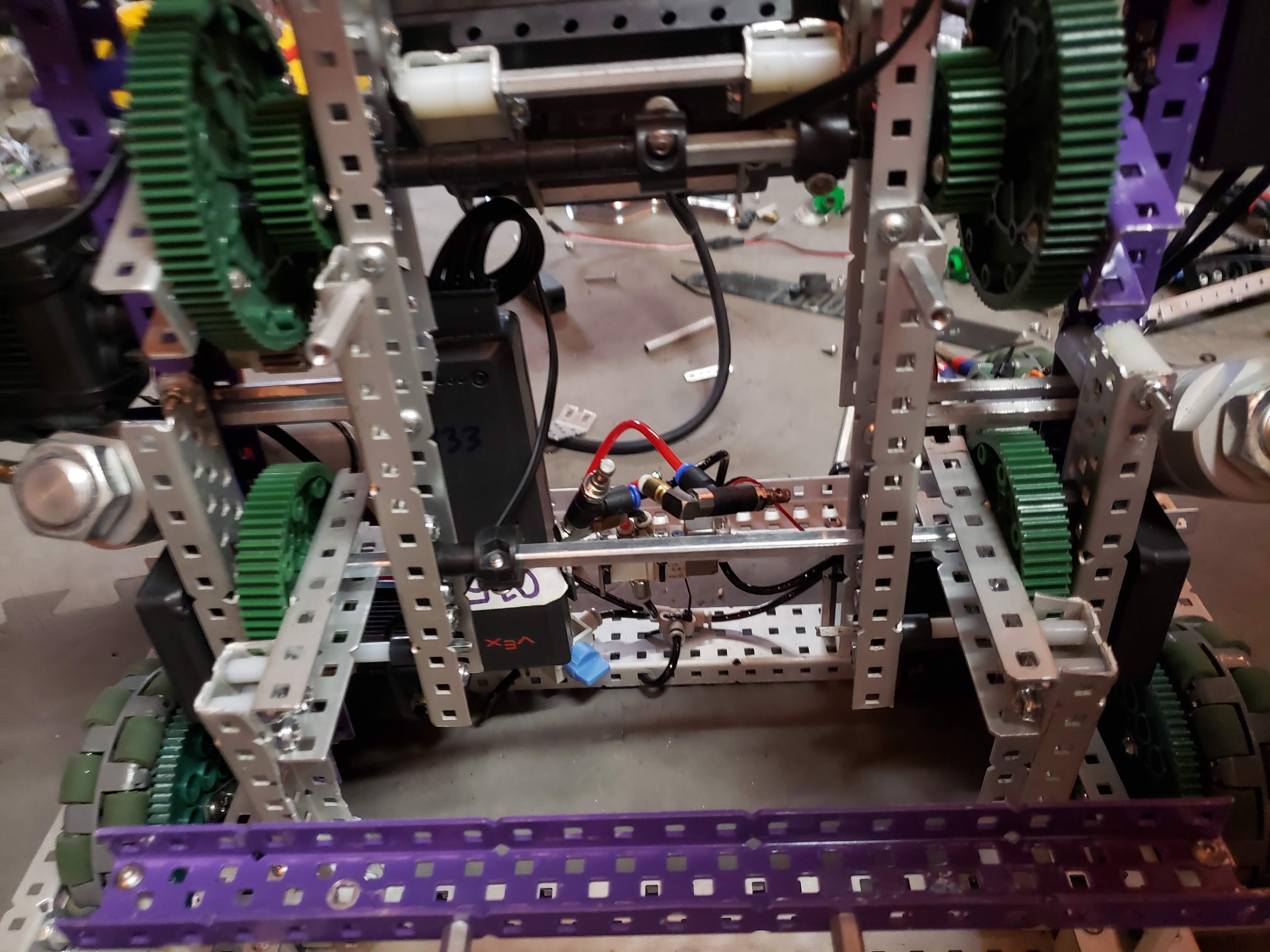
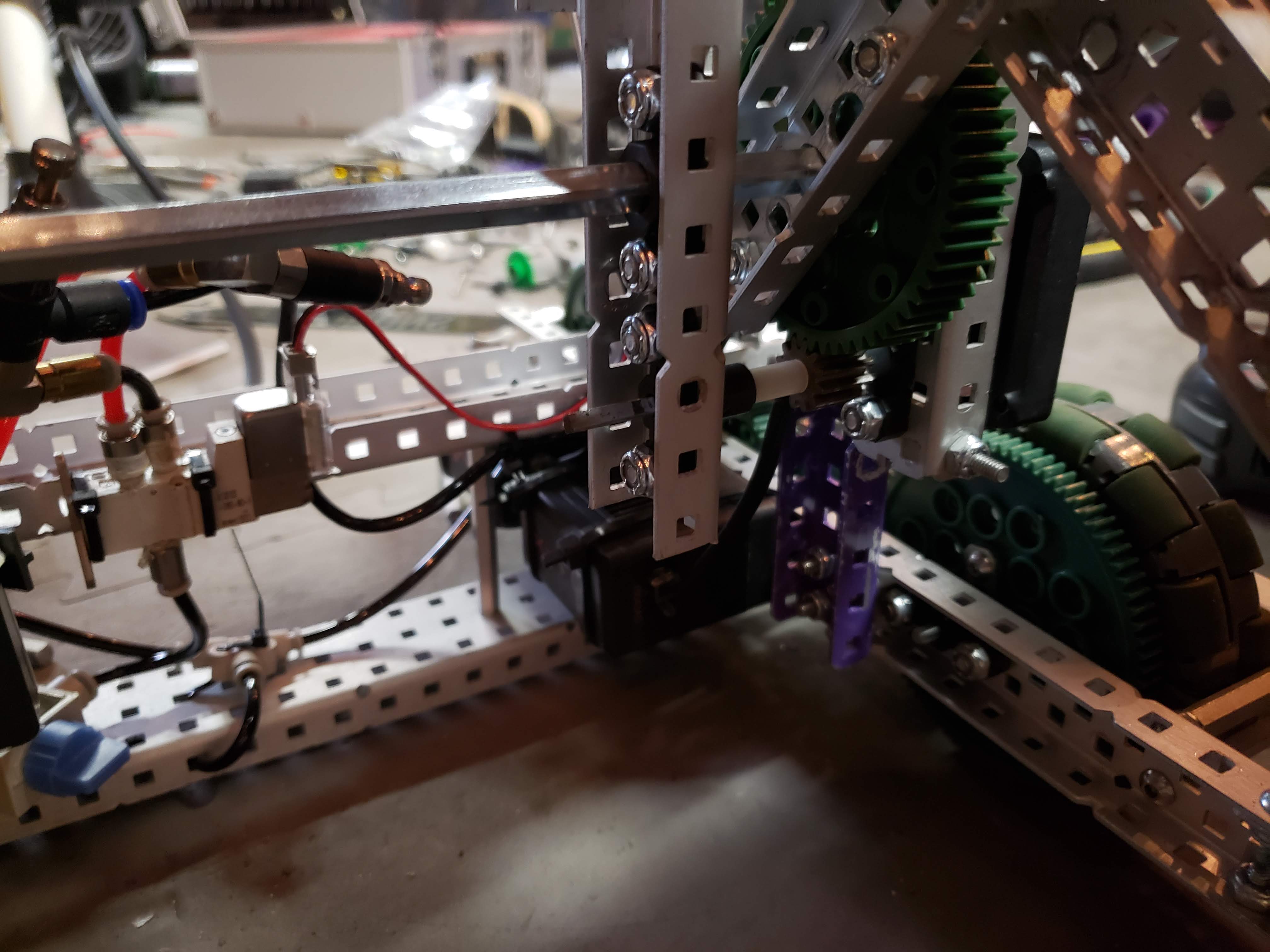
Robot-1In order to make our Autonomous more consistent we decided to use tracking wheels and odometry. This allows us to tell where our robot is on the field at all times and be able to tell our robot exact coordinates to go to on the field. CreateWe used a small Omni-Directional Wheel along with a Optical Shaft Encoder in each of our two tracking wheels along with some spacing and c channels. It took a little while to get the spacing right but soon we had near frictionless tracking wheels.
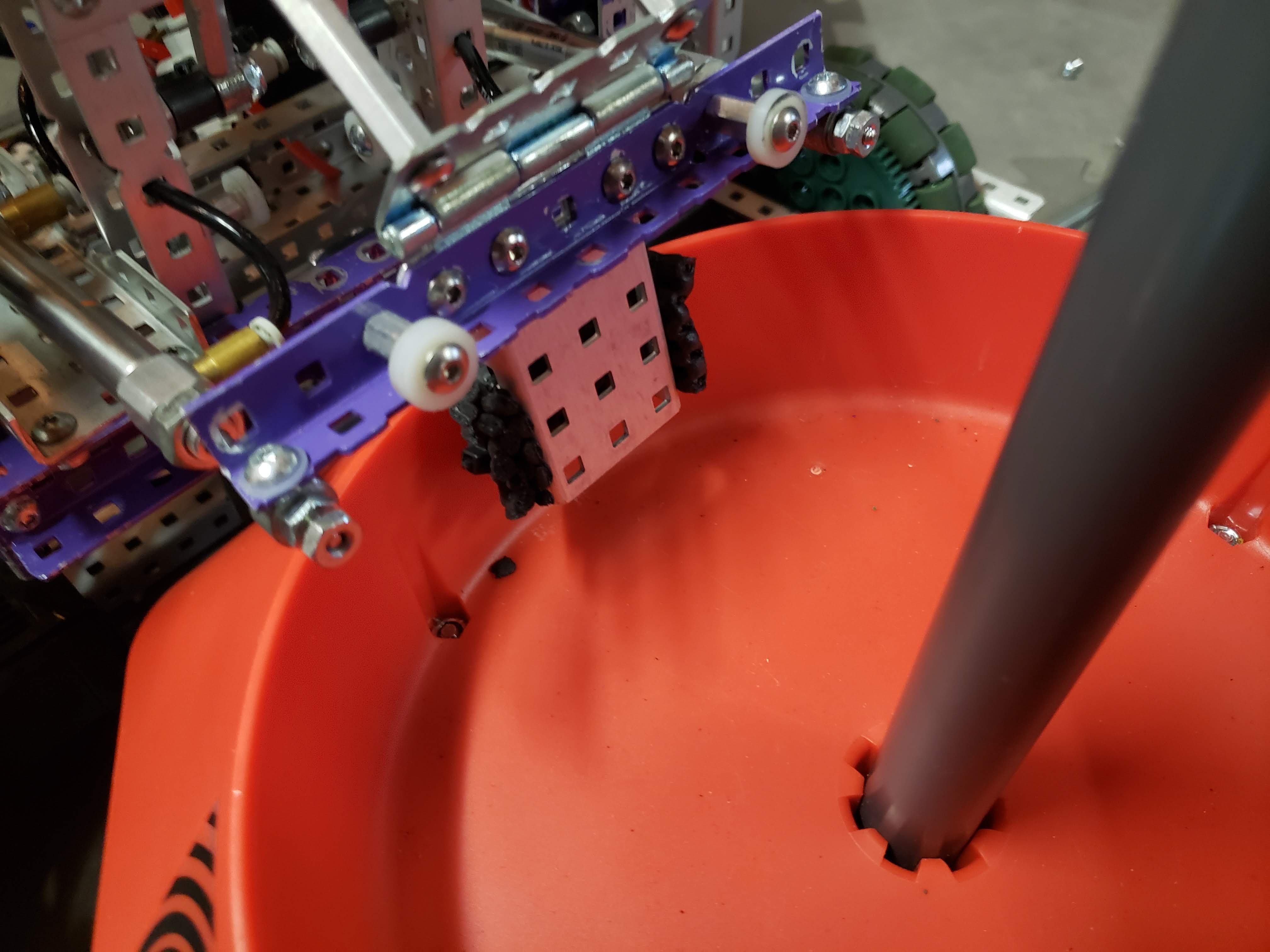
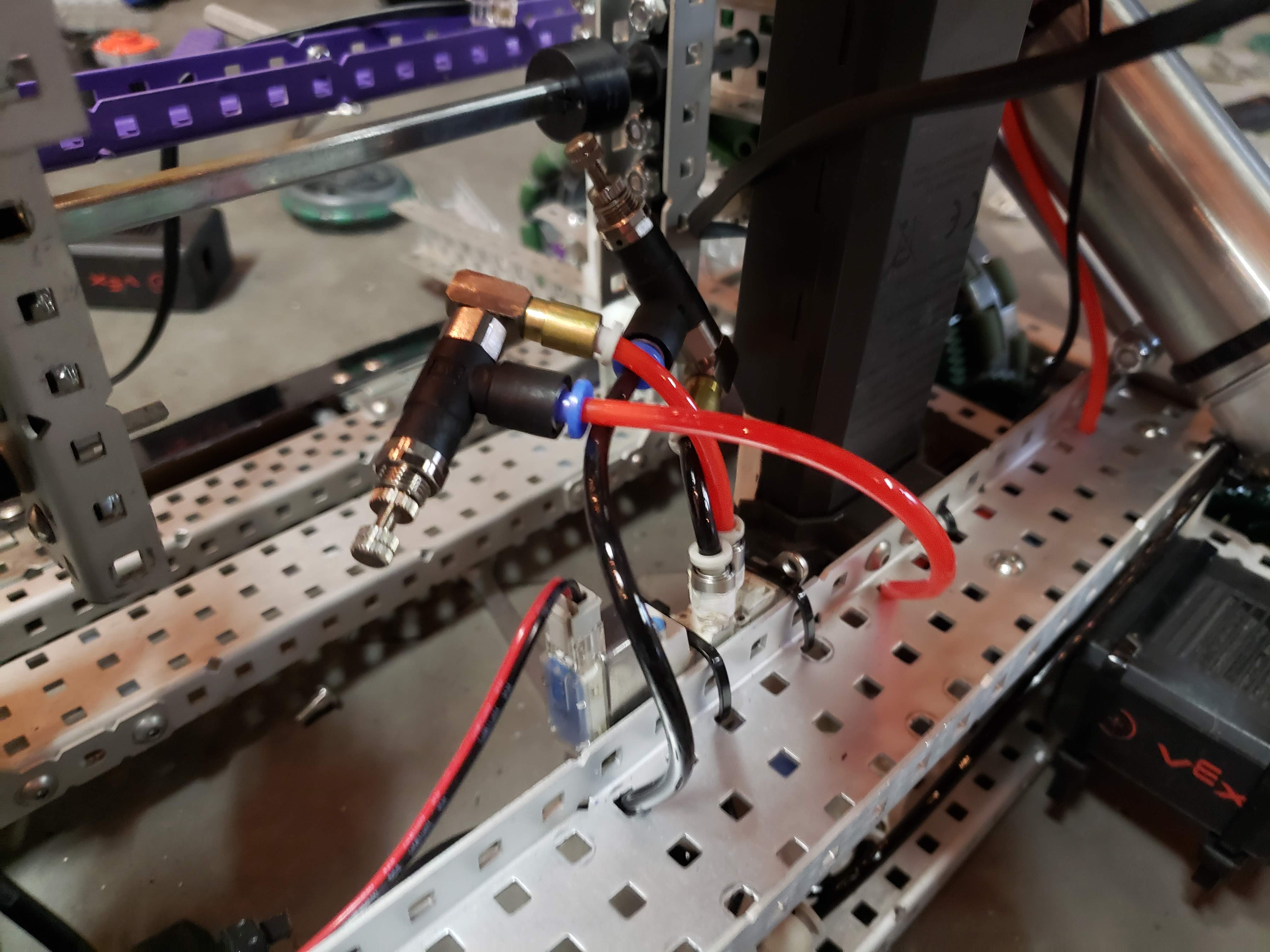
Claw 2.0.1The pneumatics pull the claw in, clamping onto the goal:
CreateWe also added a distance sensor so that the robot can see when a goal is close enough in the claw to be grabbed. This will be helpful for grabbing at the right time in autonomous:
Now we also use pressure limiters to decrease the amount of compressed air used on each actuation so that we can have more total actuations:
Holder-1.1.2CreateWe added more bracing to the holder.
TestWithout the motors attached, it seems much more sturdy than before. |
-
 The 7 Dorks
the7dorks333A@gmail.com
The 7 Dorks
the7dorks333A@gmail.com
- homeHome
- sortCategories
- labelTags
- personAbout