Build Day: Attached Brain, Attached Mobile Goal Holder, and Built Claw-2.0.0
sort
|
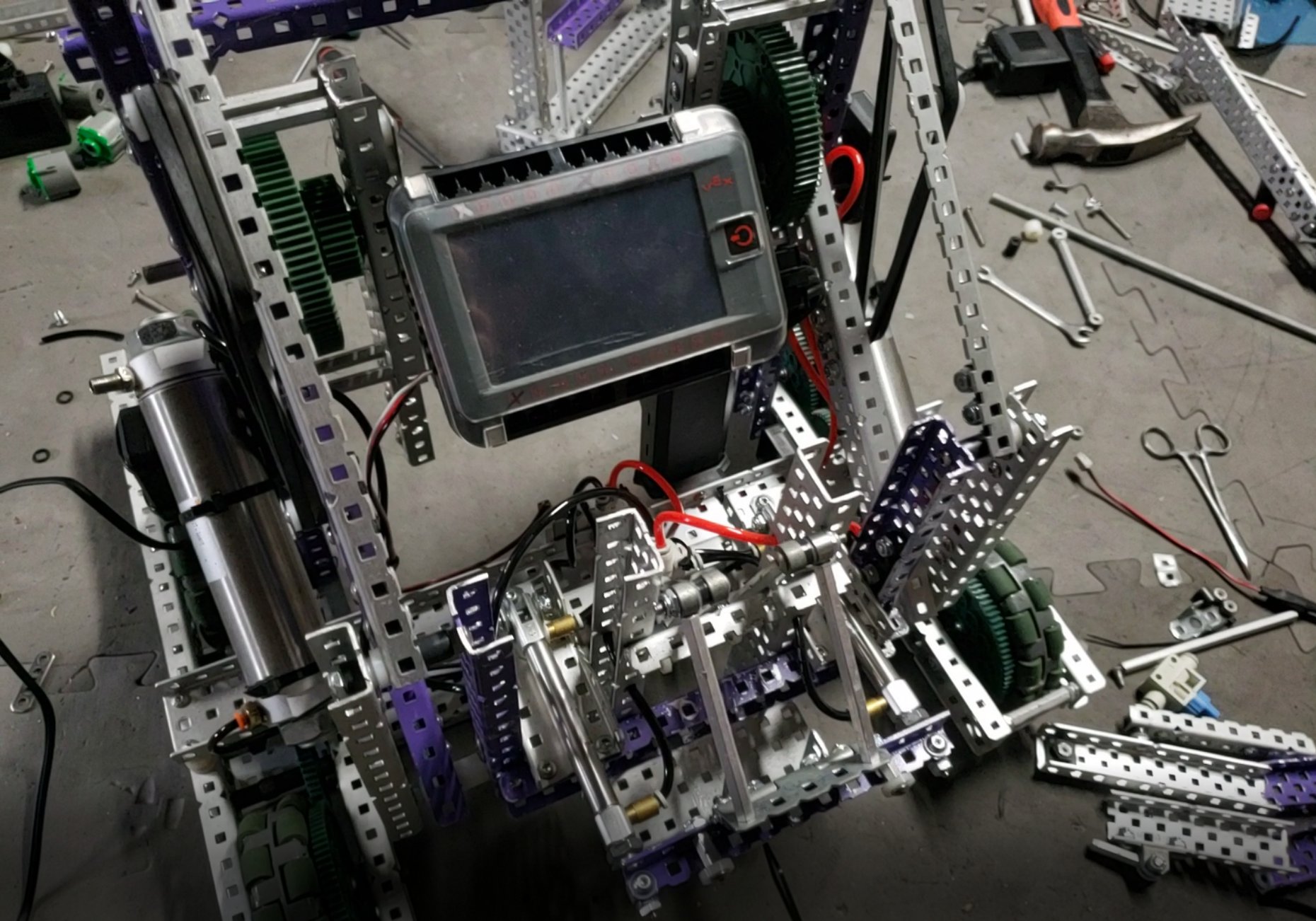
Robot-1We decided to add the Brian to the robot.
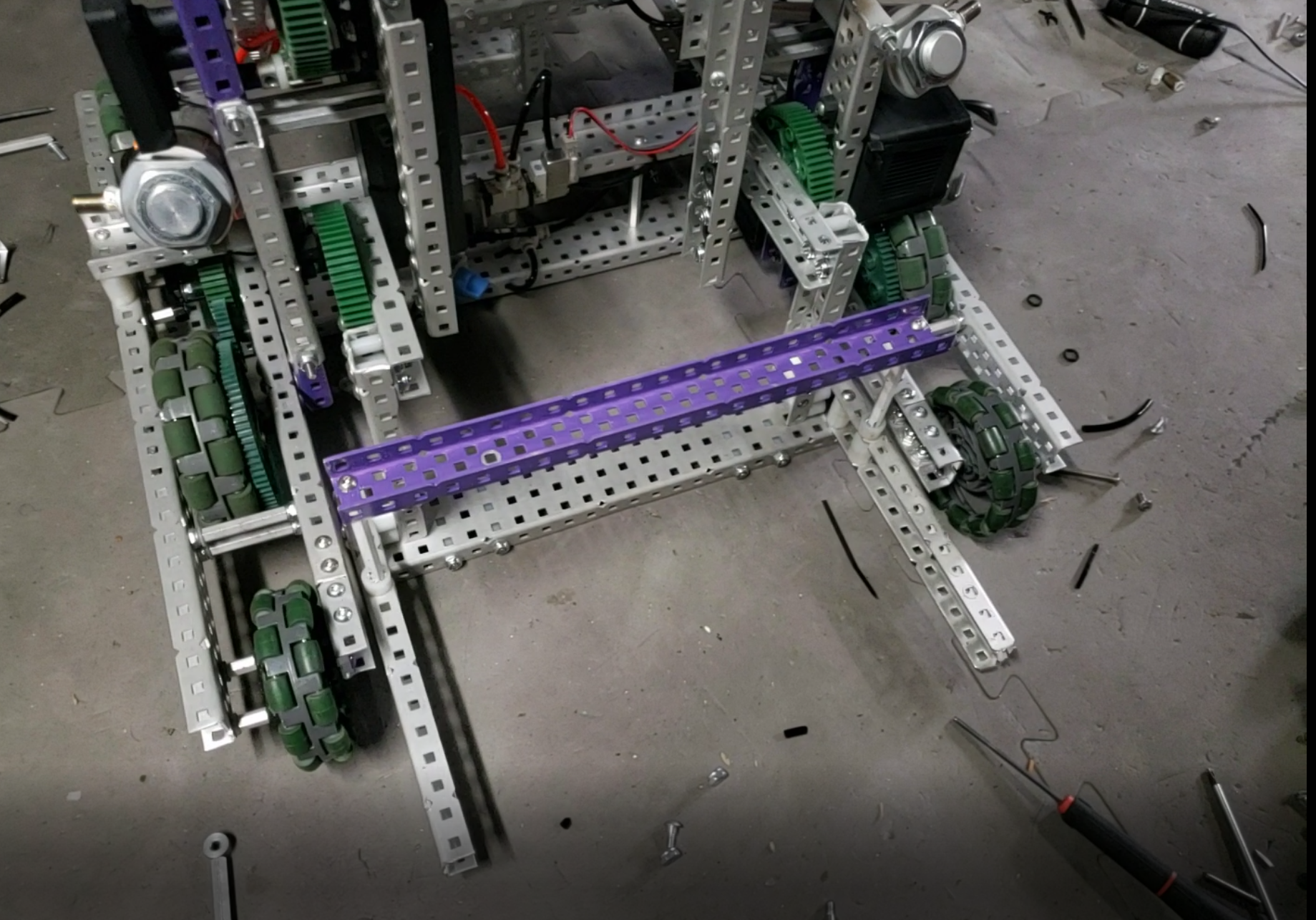
Holder-1.0.1We also attached the Mobile Goal holder to the back of our robot. This allows us to grab two goals at once. It also opens up the possibility of parking on the platform with two Mobile Goals and a robot.
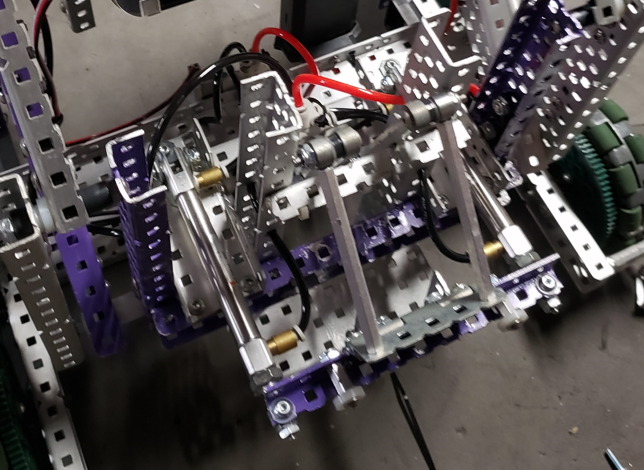
Claw-2.0.0We wanted a claw that was more reliable and applied more force to the Mobile Goals to stop them from falling out when moving around the field. This also is useful in case another team tries to steal a Mobile Goal from our claw. Design
CreateWe built the claw and discovered that it would be more effective to put a c-channel under the claw to help more firmly grip Mobile Goals and hold them in place. Then we attached the claw to the bot and mounted it onto the end of our lift and added some structure to firmly hold the claw in place.
TestIn our tests we found the claw was much stronger then we predicted and still was able activate many more times then we would need in a match. |
-
 The 7 Dorks
the7dorks333A@gmail.com
The 7 Dorks
the7dorks333A@gmail.com
- homeHome
- sortCategories
- labelTags
- personAbout