Build Day: Designing Pneumatic Claw and Extending Drivetrain
sort
|
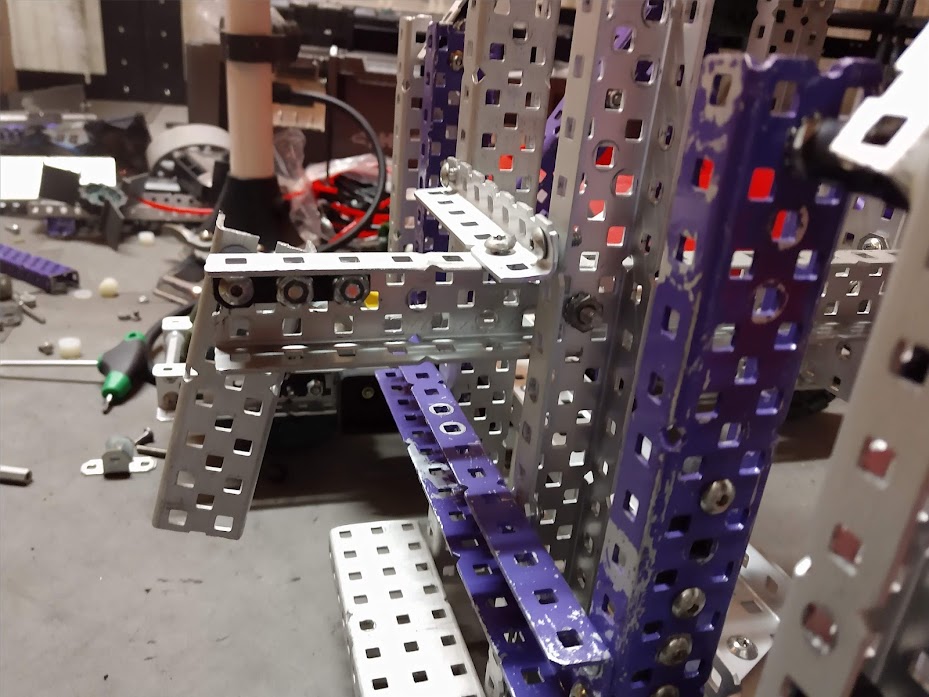
Drivetrain-1.0.1Acting on our decision from August 16, we began modifying our previous design to hold three Mobile Goals. Design
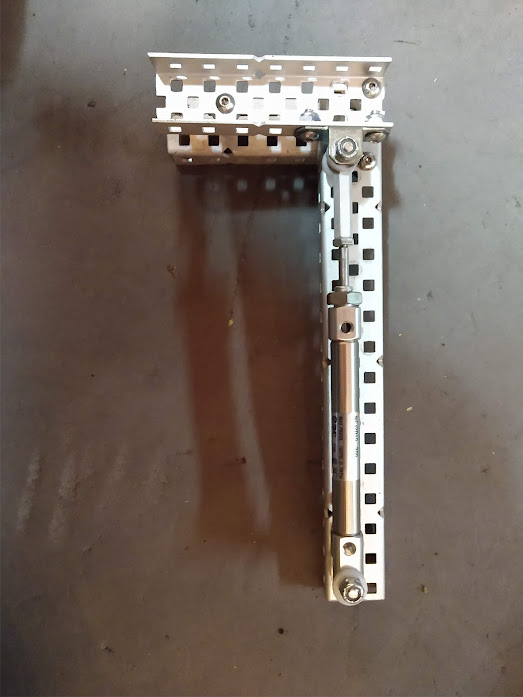
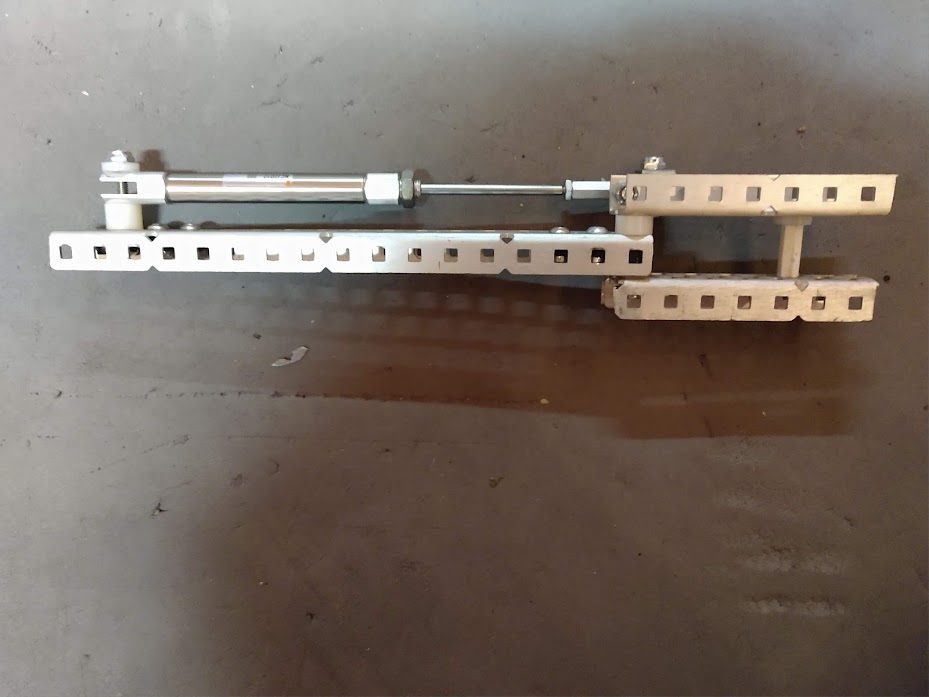
CreateWe extended our drivetrain and added unpowered wheels to give the robot a wider base and improve balance when holding Mobile Goals. TestThese wheels can spin freely for at least 20 seconds in our testing, which is a very minimal amount of friction. They are mounted sturdily, and the robot is much less tippy. This achieves our design goals just as we wanted. Claw-1.0.0Next, we needed a claw to pick up Mobile Goals. DesignUsing a double acting cylinder, some c-channels, and a simple join we designed our first claw.
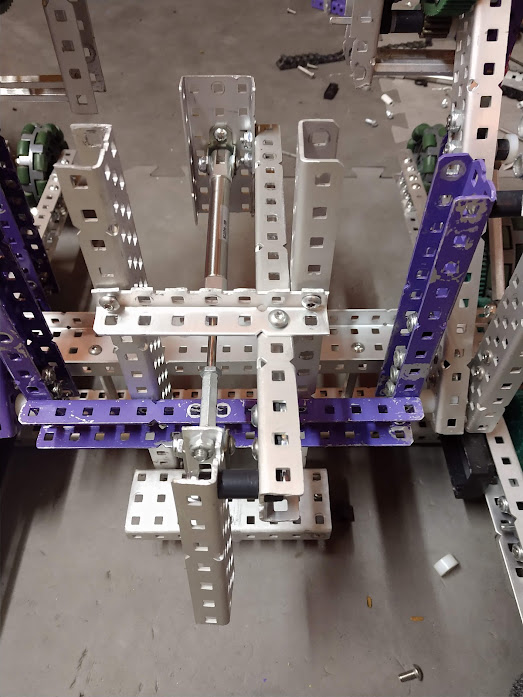
CreateWe then built the claw and attached it to the four bar lift.
TestIt can hold onto Mobile Goals, but not very tightly. We will probably want to improve this in the future. |
-
 The 7 Dorks
the7dorks333A@gmail.com
The 7 Dorks
the7dorks333A@gmail.com
- homeHome
- sortCategories
- labelTags
- personAbout